Робот-сова в качестве приманки — Robohunter
Мотивация способна сделать многое для развития инновационных технологий. В один момент люди смогли достаточно разочароваться, чтобы создать что-нибудь действительно стоящее из ничего. Некоторые люди воспринимают печатные, трёхмерные проекты, как абсолютную магию. Особенно это касается тех моментов, когда мы осознаём то, что один человек без особых усилий может создать что-то сложное и живое.
Для Джонни Пула (Jonny Poole) из компании Innerbreed FX, что находится в Великобритании, в качестве такой мотивации выступала попытка создания реалистичной, трёхмерной и анимированной приманки для хищных птиц. В процессе решения этой задачи был выполнен просто огромный объём работы, потрачено много времени. Этот проект пережил взлёты и падения, а участники неоднократно сталкивались с полнейшим разочарованием.
В процессе работы над проектом по созданию аниматронных существ, возникала проблема захвата действий птиц. На их лапы нужно было установить специальные полосы, которые отвечали за захват отслеживаемой цели. Поимка хищника должна была производиться максимально гуманным способом и в соответствии со всеми правовыми нормами. Так что людям приходилось делать невероятные вещи для того, чтобы выяснить, каким образом можно заманить хищных птиц например, ястребов.
Если вы хотите поймать дикую птицу, сначала нужно найти гнездо. Если у вас не хватает реального опыта или нет определенной научной степени, все знания основываются на научных или фантастических фильмах, с участием тех или иных животных.

Наиболее идеальная приманка для ловли хищника – это гнев, направленный на другого. Но в связи со строгими законами в Соединённых Штатах, а тем более в Великобритании, это было довольно трудно сделать.
Для создания такой приманки проще всего использовать что-то искусственное, созданное с помощью пластика и чучела, оснащённого поворотным механизмом. Джонни Пул намеревался максимально упростить процесс создания с помощью трёхмерной печати, по заданным параметрам.
Самые существенные движения – это подъём головы, раскрытие клюва и, самое сложное, взмах крыльев.

“Я уверен, что если проект себя полностью оправдает, в дальнейшем полностью отпадёт необходимость применения, в качестве приманки, живых существ, путём замены их аниматронными. Моя цель – воплощение этой идеи в реальность”, — говорит Джонни Пул.
Чтобы получить разрешение на использование живой птицы в качестве приманки – задача довольно проблематичная, так как для приманки это может довольно плохо закончиться, а поимка хищника может не состояться. Вторая проблема – птица, которая используется в качестве приманки, должна быть ухожена и защищена от всех видов повреждений.
Пул говори, что искусственная приманка должна быть максимально сбалансирована и не содержать большое количество пластика, так как это может нарушить естественный баланс гнезда, а это приведет к провалу всего исследования до получения каких-либо результатов.

Исследователи часто отправляются глубоко в сельскую местность, поэтому ловушка и приманка должны быть максимально защищенными. Кроме того они должны работать даже в отсутствие людей, а приманка должна выдавать максимально естественные движения.
“Любая приманка может управляться как с помощью портативных устройств, так и с помощью заранее запрограммированного кода, который будет случайный код, приближенный к естественным движениям”, — говорит Пол.
 В основе аниматронной птицы лежит блок с сервоприводами, который идеально подходит для обеспечения управления всем устройством. Один такой блок может содержать около восьми приводов, а его размеры составляют 6х7 дюймов (приблизительно 15х17 сантиметров), с отделением для приёмника сигнала с пульта управления.
В основе аниматронной птицы лежит блок с сервоприводами, который идеально подходит для обеспечения управления всем устройством. Один такой блок может содержать около восьми приводов, а его размеры составляют 6х7 дюймов (приблизительно 15х17 сантиметров), с отделением для приёмника сигнала с пульта управления.
Во всех предыдущих проектах, Пул использовал подручный материал и изготавливал компоненты вручную. Впоследствии он овладел программным обеспечением САПР (системы автоматизированного проектирования). С возникновением 3d печати, у него появилась возможность сосредоточиться на решении концептуальных творческих вопросов, а не на развитии ручных ремесел.
Технология трёхмерной печати, в процессе творчества, делает производство элементов намного проще.
“Если я не могу найти деталь на рынке – я сдёлаю её сам и предоставлю возможность приобрести эту деталь другим”, — рассказывает Джонни Пул.
Компания Innerbreed FX специализируется на аниматронике, 3d искусстве и моделировании, а также на моделировании физических объектов, механических конструкциях. Её основатель – инженер-механик Джонни Пул, большинство проектов которого, используют возможности 3d печати.
Источник: 3d-daily
robo-hunter.com
Флэтовый торговый робот для Metatrader 4 «Сова»
Советник используется при торговле в относительно спокойный период на рынке между закрытием Нью-Йоркской и открытием Токийской сессий.
Открытие позиций в европейских часовых поясах обычно происходит по ночам. Позиции удерживаются от 1 до 7 часов.
Обратите внимание: если ваш брокер не поддерживает возможность открытия хеджирующих позиций, вам необходимо открыть два отдельных счета — один для длинных, и один для коротких позиций.
Перед запуском торгоого робота вам понадобится настроить сдвиг часового пояса (смотрите описание ниже). Если вы тестируете советник на котировках брокера, который смещает часовой пояс с учетом летнего и зимнего времени, вам придется выбирать периоды в 6 месяцев и устанавливать для каждого из них правильный сдвиг часового пояса.
Этот торговый робот может работать с котировками ECN и STP брокеров.
Основной тайм-фрейм для работы советника — h2.
Валютная пара — EURUSD.
Для использования на других валютных парах понадобится дополнительная настройка переменных. Настоятельно рекомендуется использовать данный советник только на одной валютной паре.
Установка советника
- Извлеките файлы из zip-архива;
- Скопируйте файл торгового робота (NightOwl 110.ex4) в папку NightOwl 110;
- Перезапустите MetaTrader;
- Убедитесь, что владка «Expert Advisors» в меню Сервис\Настройка\Советники торгового терминала Metatrader 4 выглядит следующим образом.
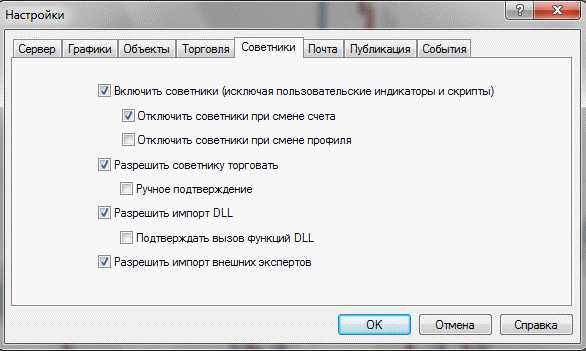
- Нажмите кнопку OK, когда закончите с настройкой. Следующее сообщение еще раз напомнит вам о необходимости настройки сдвига часового пояса.
Настраиваемые параметры торгового робота
MagicNumber = 1010009; // Значение на ваше усмотрение.
LotSize = 0.01; // размер открываемых позиций. Можете изменить его в сторону увеличения, однако это значительно повысит риск торговли.
GMT.Offset = 0; // сдвиг часового пояса. Параметр, обязательный для настройки: если ваш брокер использует систему часовых поясов GMT, оставьте это значение равным нулю. В случае, если ваш брокер использует систему CET, вам необходимо настроить сдвиг часовых поясов в системе GMT (к примеру, GMT3+ для Москвы).
TrailingStop = 10; // значение для трейлинг-стопа, который будет использоваться советником. По умолчанию установлено минимально допустимое значение.
MinProfitPips = 4; // минимальное значение потенциальной прибыли по позиции в пунктах. Советник не будет открывать позиции, если потенциальная прибыль меньше заданного значения.
DiffMin = 15; // минимальная ширина ценового коридора в пунктах.
DiffMax = 45; // максимальная ширина ценового коридора в пунктах.
SLFactor = 1.00; // часть ценового коридора для установки стоп-лосс.
TPFactor = 4.00; // часть ценового коридора для установки тейк-профит.
BandFactor = 4.00; // часть ценового коридора для входа в рынок.
LookBackHours = 3; // количество баров для принятия решений об образовании ценового коридора.
MaxOrdersEachType = 2; // максимальное количество одновременно открытых позиций.
MinTimeBetweenOrders = 900; // минимальное время (в секундах) между успешно откытыми ордерами.
LotSizeMultiplier = 2.0; // увеличивающий коэффициент для объема торговли при обнаружении тренда. Возможные значения от 1 до 6 в зависимости от вашей готовности к риску.
TrendPeriod = 6; // базовый период тренда: 1=M1, 2=M5…. 9=MN1.
LTT.MaMethod = 3; // тип скользящей средней для выявления тренда: 0=SMA 1=EMA 2=Smoothed 3=LWMA.
ECN.Broker = false; // установите это значение на «true», если устанавливаете советник на счет у ECN или STP брокера.
Slippage = 5; // размер максимального проскальзывания в пунктах
OrderRetries = 12; // максимальное количество попыток соединения с сервером брокера при разрыве связи.
Debug.Print.OrderInfo = false; // запись ценового потока в файл. Измените это значение на «true», если имеете основания полагать, что брокер слишком часто выставляет реквоты или исполняет ордера с большими проскальзываниями.
fxlot.ru
Сова робот в качестве приманки — 3d-daily
Мотивация способна сделать многое для развития инновационных технологий. В один момент люди смогли достаточно разочароваться, чтобы создать что-нибудь действительно стоящее из ничего. Некоторые люди воспринимают печатные, трёхмерные проекты, как абсолютную магию. Особенно это касается тех моментов, когда мы осознаём то, что один человек без особых усилий может создать что-то сложное и живое.
Для Джонни Пула (Jonny Poole) из компании Innerbreed FX, что находится в Великобритании, в качестве такой мотивации выступала попытка создания реалистичной, трёхмерной и анимированной приманки для хищных птиц. В процессе решения этой задачи был выполнен просто огромный объём работы, потрачено много времени. Этот проект пережил взлёты и падения, а участники неоднократно сталкивались с полнейшим разочарованием.
В процессе работы над проектом по созданию аниматронных существ, возникала проблема захвата действий птиц. На их лапы нужно было установить специальные полосы, которые отвечали за захват отслеживаемой цели. Поимка хищника должна была производиться максимально гуманным способом и в соответствии со всеми правовыми нормами. Так что людям приходилось делать невероятные вещи для того, чтобы выяснить, каким образом можно заманить хищных птиц например, ястребов.
Если вы хотите поймать дикую птицу, сначала нужно найти гнездо. Если у вас не хватает реального опыта или нет определенной научной степени, все знания основываются на научных или фантастических фильмах, с участием тех или иных животных.

Наиболее идеальная приманка для ловли хищника – это гнев, направленный на другого. Но в связи со строгими законами в Соединённых Штатах, а тем более в Великобритании, это было довольно трудно сделать.
Для создания такой приманки проще всего использовать что-то искусственное, созданное с помощью пластика и чучела, оснащённого поворотным механизмом. Джонни Пул намеревался максимально упростить процесс создания с помощью трёхмерной печати, по заданным параметрам.
Самые существенные движения – это подъём головы, раскрытие клюва и, самое сложное, взмах крыльев.

“Я уверен, что если проект себя полностью оправдает, в дальнейшем полностью отпадёт необходимость применения, в качестве приманки, живых существ, путём замены их аниматронными. Моя цель – воплощение этой идеи в реальность”, — говорит Джонни Пул.
Чтобы получить разрешение на использование живой птицы в качестве приманки – задача довольно проблематичная, так как для приманки это может довольно плохо закончиться, а поимка хищника может не состояться. Вторая проблема – птица, которая используется в качестве приманки, должна быть ухожена и защищена от всех видов повреждений.
Пул говори, что искусственная приманка должна быть максимально сбалансирована и не содержать большое количество пластика, так как это может нарушить естественный баланс гнезда, а это приведет к провалу всего исследования до получения каких-либо результатов.

Исследователи часто отправляются глубоко в сельскую местность, поэтому ловушка и приманка должны быть максимально защищенными. Кроме того они должны работать даже в отсутствие людей, а приманка должна выдавать максимально естественные движения.
“Любая приманка может управляться как с помощью портативных устройств, так и с помощью заранее запрограммированного кода, который будет случайный код, приближенный к естественным движениям”, — говорит Пол.
В основе аниматронной птицы лежит блок с сервоприводами, который идеально подходит для обеспечения управления всем устройством. Один такой блок может содержать около восьми приводов, а его размеры составляют 6х7 дюймов (приблизительно 15х17 сантиметров), с отделением для приёмника сигнала с пульта управления.
Во всех предыдущих проектах, Пул использовал подручный материал и изготавливал компоненты вручную. Впоследствии он овладел программным обеспечением САПР (системы автоматизированного проектирования). С возникновением 3d печати, у него появилась возможность сосредоточиться на решении концептуальных творческих вопросов, а не на развитии ручных ремесел.

Технология трёхмерной печати, в процессе творчества, делает производство элементов намного проще.
“Если я не могу найти деталь на рынке – я сдёлаю её сам и предоставлю возможность приобрести эту деталь другим”, — рассказывает Джонни Пул.
Компания Innerbreed FX специализируется на аниматронике, 3d искусстве и моделировании, а также на моделировании физических объектов, механических конструкциях. Её основатель – инженер-механик Джонни Пул, большинство проектов которого, используют возможности 3d печати.
3d-daily.ru
Hibou Умная сова Интерактивная игрушка — «Аналог Фёрби»
В общем -то , не плохая игрушка. Просто, как и Фёрби , такая же бесполезная …Hibou Умная сова Интерактивная игрушка это игрушка на неделю, ну может на две…и всё ..интерес к ней пропадает…По функциям Умная сова лишь чуточку уступает Фёрби:
- рассказывает сказки;
- говорит странным мужским голосом…голосом ..пардон за мой французкий..гопника…
- поет песни;
- повторят сказанные человеком слова;
- искажает сказанные слова;
- через плашет ее можно : кормить, поить, она вам будет играть на инструментах и прочее…
- хлопает глазами, при болтании открывает \закрывает клюв;
- что-то болтает по английски;
- стоит около 2500-3000;
- реагирует на почесывания, поглаживания, если перевернуть будет возмущаться.
Больше ни в чем умном замечен не был:))








irecommend.ru
сова робот — Видео
Опубликовано: 1 час назад
138 716 просмотров
Опубликовано: меньше минуты назад
1 435 894 просмотра
Опубликовано: 2 часа назад
7 655 просмотров
Опубликовано: меньше минуты назад
2 197 512 просмотров
Опубликовано: меньше минуты назад
2 531 095 просмотров
Опубликовано: меньше минуты назад
928 просмотров
Опубликовано: 2 часа назад
224 834 просмотра
Опубликовано: 1 час назад
107 356 просмотров
Опубликовано: меньше минуты назад
1 027 859 просмотров
Опубликовано: меньше минуты назад
42 748 просмотров
Опубликовано: 1 час назад
147 628 просмотров
Опубликовано: меньше минуты назад
27 186 просмотров
Опубликовано: меньше минуты назад
170 211 просмотров
Опубликовано: меньше минуты назад
184 579 просмотров
Опубликовано: меньше минуты назад
225 719 просмотров
Опубликовано: меньше минуты назад
231 662 просмотра
Опубликовано: 3 часа назад
9 968 просмотров
Опубликовано: меньше минуты назад
41 153 просмотра
Опубликовано: меньше минуты назад
5 577 просмотров
videohot.ru
Принцип работы СОВ
Принцип работы СОВСОВ всё чаще становятся необходимым дополнением инфраструктуры сетевой безопасности. В дополнение к межсетевым экранам (МЭ), работа которых происходит на основе политики безопасности, СОВ служат механизмами мониторинга и наблюдения подозрительной активности. Они могут обнаружить атакующих, которые обошли МЭ, и выдать отчет об этом администратору, который, в свою очередь, предпримет дальнейшие шаги по предотвращению атаки. Технологии обнаружения проникновений не делают систему абсолютно безопасной, однако, практическая польза от применения СОВ весьма значительна.
Использование СОВ помогает достичь нескольких целей:
• обнаружить вторжение или сетевую атаку;
• спрогнозировать возможные будущие атаки и выявить уязвимости для предотвращения их дальнейшего развития. Атакующий обычно выполняет ряд предварительных действий, таких как, например, сетевое зондирование (сканирование) или другое тестирование для обнаружения уязвимостей целевой системы;
• выполнить документирование существующих угроз;
• обеспечить контроль качества администрирования с точки зрения безопасности, особенно в больших и сложных сетях;
• получить полезную информацию о проникновениях, которые имели место, для восстановления и корректирования вызвавших проникновение факторов;
• определить расположение источника атаки по отношению к локальной сети (внешние или внутренние атаки), что важно при принятии решений о расположении ресурсов в сети.
Схема включения СОВ
Межсетевой экран установлен на границе защищаемой сети и блокирует основные часто встречающиеся атаки. Для правильной настройки межсетевого экрана и антивирусного ПО на компьютерах защищаемой подсети администратору необходимо иметь доступ к информации, с помощью которой можно анализировать весь сетевой трафик. Решение этой задачи заключается в установке СОВ непосредственно за межсетевым экраном для отслеживания атак со стороны внешних и внутренних нарушителей.
Рисунок 1
Этапы защиты сети (Рисунок 1):
• администратор подключает С-Терра СОВ на границе защищаемой сети и настраивает зеркалирование всего трафика информационной системы на СОВ. СОВ на основе правил обнаружения анализирует трафик и предоставляет администратору полную информацию о сетевых атаках;
• злоумышленники атакуют защищаемую сеть, допустим, что атака проходит в защищаемый контур, минуя межсетевой экран;
• администратор на основе анализа данных просматривает информацию об атаке, устанавливает IP-адрес источника, тип атаки и иную необходимую информацию;
• с учетом полученной информации администратор настраивает на межсетевом экране блокирующие правила, обновляет ОС, антивирусы компьютеров или производит иные действия, позволяющие блокировать повторную атаку, в результате повторная атака будет остановлена.
doc.s-terra.ru